Foretellix Targets Increasingly Visible Gaps in Autonomous Vehicle Safety
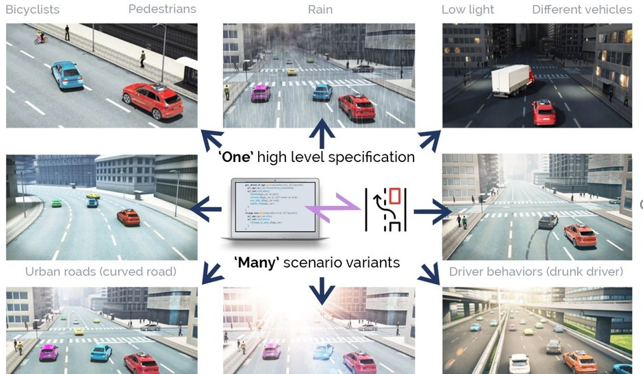
One M-SDL scenario specification allows to represent many scenario variants
Foretellix, an Israeli based start-up with a mission to enable measurable safety of autonomous vehicles (AVs), today announced it has opened Measurable Scenario Description Language (M-SDL) to the ADAS and AV ecosystem and contributed the language concepts to the Association for Standardization of Automation and Measuring Systems (ASAM) standards committee. M-SDL is the first open language that addresses multiple shortcomings of today’s formats, languages, methods and metrics used to verify and validate vehicle safety.
Foretellix also announced its M-SDL Partners Program, providing a mechanism for industry feedback and refinement of M-SDL. A partial list of members includes AVL List GmbH, Volvo Group, Unity Technologies, Horiba Mira Ltd, TÜV SÜD, Automotive Artificial Intelligence (AAI) GmbH, Metamoto Inc, Vector Zero Inc, Trustworthy Systems Lab of Bristol University, and Advanced Mobility Institute of Florida Polytechnic University.
As many industry experts have noted, safety methods and metrics based on quantity of miles driven in simulation and road testing, the number of disengagements, and/or traditional test coverage are insufficient, non-scalable, and not easily shared or reused.
In addition, due to the autonomous uncontrollable behavior of AVs and traffic, developers cannot be sure their tests are actually orchestrating desired scenarios or evaluating test coverage as intended. Finally, none of these techniques offer adequate mechanisms to identify previously unknown hazardous edge case scenarios nor aggregate coverage metrics across all virtual and physical testing platforms.
By opening and contributing M-SDL, tool vendors, suppliers and developers will be able to 1) use a common, human readable, high level language to simplify the capture, reuse and sharing of scenarios, 2) easily specify any mix of scenarios and operating conditions to identify previously unknown hazardous edge cases, and 3) monitor and measure the coverage of the autonomous functionality critical to prove AV safety, independent of tests and testing platforms.
“The ability to achieve measurable safety of AVs is still being limited by a lack of standards, methods and metrics that inhibit reuse and sharing, are insufficient and/or non-scalable,” said Ziv Binyamini, CEO of Foretellix. “We believe in an open ecosystem and open standards, and are actively supporting ASAM in its efforts to create an open language standard.”
Category: AUTONOMOUS, Electric Vehicles, Featured, General Update, News, Safety
Subscribe
If you enjoyed this article, subscribe to receive more just like it.